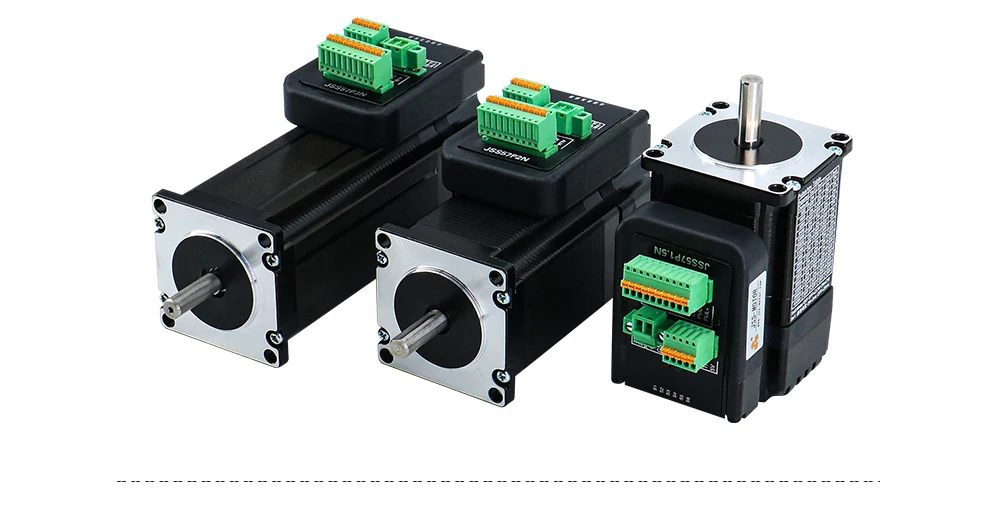
Motor Nema 23 Servomotor PaP Circuito Cerrado 4.2A 48v CNC – JSS57P1.5N
JSS57 es un nuevo sistema de servoaccionamiento híbrido integrado motorizado con función de comunicación.Utilizando una nueva generación de tecnología de control DSP de 32 bits y tecnología de control de circuito cerrado, puede evitar la falta de pasos y garantizar la precisión del producto;La atenuación del par de alta velocidad es mucho menor que la del accionamiento de circuito abierto tradicional, lo que puede mejorar en gran medida el rendimiento de alta velocidad y el par del motor paso a paso.La tecnología de control de corriente basada en carga puede reducir eficazmente el aumento de temperatura del motor y prolongar la vida útil del motor.Señal de salida de alarma y posición integrada, conveniente para monitorear y controlar la computadora host;La función de alarma de error de posición garantiza el funcionamiento seguro del equipo de procesamiento.Es una actualización ideal para los variadores paso a paso de circuito abierto tradicionales y puede reemplazar algunos servosistemas de CA tradicionales a un precio de solo el 50% del servosistema de CA.
 |
| Ahorre espacio | Motor y tracción en uno
Integración de motores y controladores, sin cableado complejo, Más competencia por espacio de instalación de motores. |
|
| No pierdas el paso | Control de circuito cerrado, sin pérdida de pasos
El codificador de posición está instalado y la tecnología de control vectorial. se adopta para que tenga las características de circuito cerrado de el servomotor, que soluciona fundamentalmente el problema del paso de pérdida del motor tradicional |
|
| Baja fiebre | Bajo calor/alta eficiencia
Ajuste la corriente en tiempo real según la carga real. para reducir el calor; Cerca del 9% de la capacidad de salida de par, en un espacio compacto para reproducir una mayor conversión de energía, Ahorro de energía y alta eficiencia. |
|
| Momento grande
de fuerza |
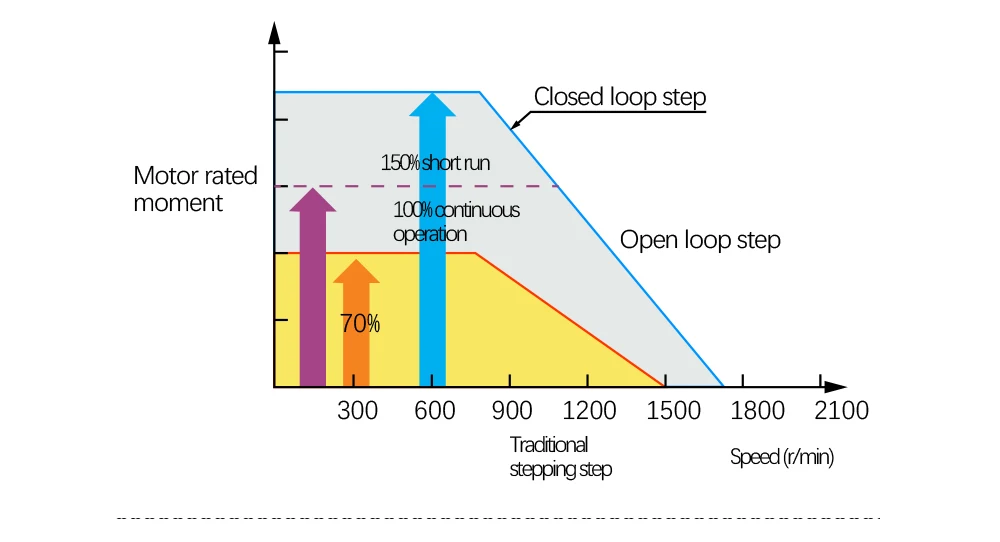
Alto par/alta velocidad
El rendimiento de alta velocidad del sistema de servo accionamiento híbrido es más del 30% más alto que el del paso a paso de circuito abierto, y el par efectivo aumenta a más del 70% de el par de retención, para que el motor pueda mantener un par alto operación en el proceso de alta velocidad |
|
| Suave y
Preciso |
Para resolver el problema del ruido de vibración a baja velocidad.
El algoritmo de control de corriente vectorial espacial y suavizado vectorial La tecnología de filtrado basada en el codificador de retroalimentación tiene una buena resistencia a la “resonancia de baja frecuencia” que causa problemas el motor paso a paso tradicional. |
|
| Alta velocidad
Respuesta |
Adecuado para la distancia final, arranque rápido, parada y otras ocasiones.
El servosistema híbrido conserva algunas ventajas del tradicional Sistema paso a paso de circuito abierto. La salida de respuesta de posición y La señal de comando de entrada se sincroniza casi en tiempo real. La tecnología de servo control proporciona una gran salida de par, de modo que El sistema tiene una respuesta dinámica de alta velocidad. |

|
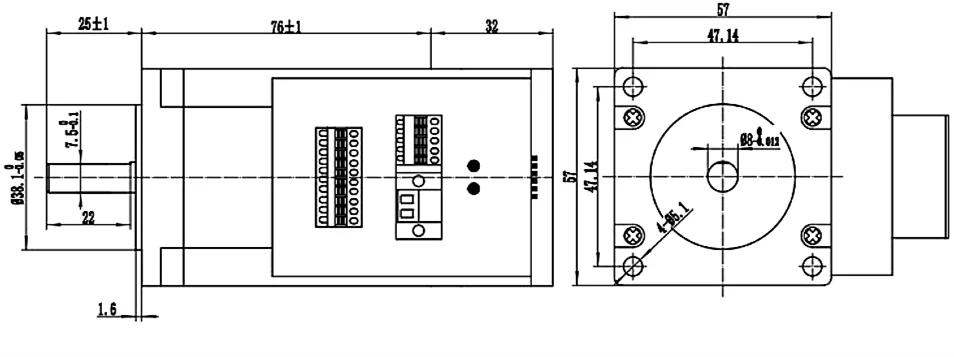
MOTOR DE PASADOR HÍBRIDO TIPO 57HSE56-4204A08-D25-03 |
||||
|
Especificaciones |
Diagrama |
|||
|
Ángulo de paso |
1.8±5% |
Actual |
4,2A |
|
|
No de fase. |
2 |
Resistencia |
0.4±10%Ω |
|
|
Resistencia de aislamiento |
100 Mohm (500 V CC) |
Inductancia |
1,2 ± 20 % mH |
|
|
Clase de aislamiento |
B |
Parque de sujeción |
12 kg.cm |
|
|
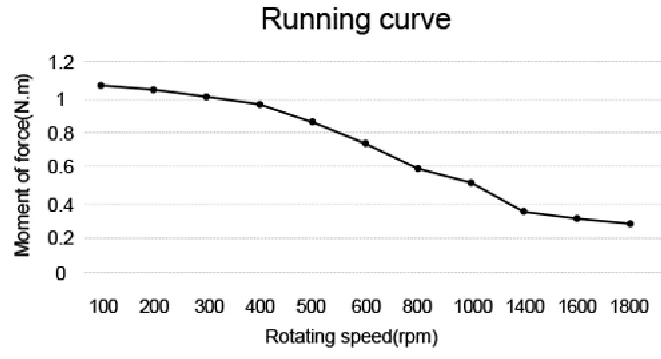
Curva de operación de circuito cerrado integrada 57P1.5N |
||
|
Velocidad de rotación (rpm) |
Momento de fuerza (N.m) |
Voltaje de accionamiento: 24 V Subdivisión: 400 |
|
100 |
1.08 |
|
|
200 |
1.06 |
|
|
300 |
1.02 |
|
|
400 |
0.98 |
|
|
500 |
0.88 |
|
|
600 |
0.76 |
|
|
800 |
0.62 |
|
|
1000 |
0.54 |
|
|
1400 |
0.38 |
|
|
1600 |
0.34 |
|
|
1800 |
0.31 |
|
|
MOTOR DE PASADOR HÍBRIDO TIPO JSS57P2N |
||||
|
Especificaciones |
Diagrama |
|||
|
Ángulo de paso |
1.8±5% |
Actual |
4,2A |
|
|
No de fase. |
2 |
Resistencia |
0.5±10%Ω |
|
|
Resistencia de aislamiento |
100 Mohm (500 V CC) |
Inductancia |
1,8 ± 20 % mH |
|
|
Clase de aislamiento |
B |
Parque de sujeción |
20 kg.cm |
|
|
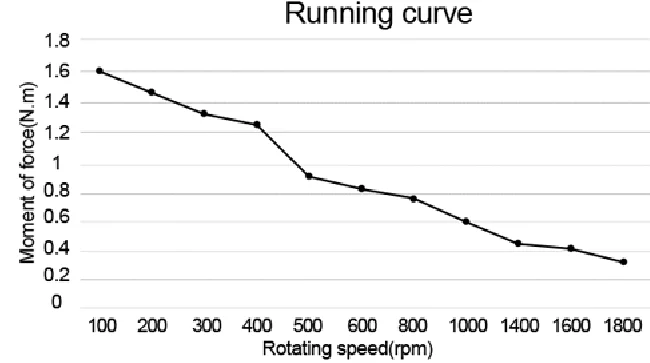
Curva de operación de circuito cerrado integrada 57P2N |
||
|
Velocidad de rotación (rpm) |
Momento de fuerza (N.m) |
Voltaje de accionamiento: 24 V Subdivisión: 400 |
|
100 |
1.6 |
|
|
200 |
1.48 |
|
|
300 |
1.34 |
|
|
400 |
1.26 |
|
|
500 |
0.96 |
|
|
600 |
0.85 |
|
|
800 |
0.77 |
|
|
1000 |
0.6 |
|
|
1400 |
0.43 |
|
|
1600 |
0.42 |
|
|
1800 |
0.32 |
|
|
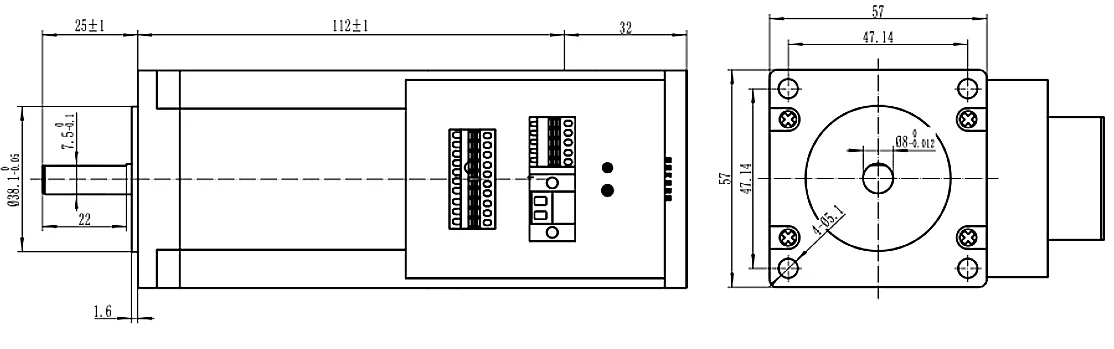
MOTOR DE PASADOR HÍBRIDO TIPO 57HSE112-4004A08-D25-05 |
||||
|
Especificaciones |
Diagrama |
|||
|
Ángulo de paso |
1.8±5% |
Actual |
4,0 A. |
|
|
No de fase. |
2 |
Resistencia |
0.9±10%Ω |
|
|
Resistencia de aislamiento |
100 Mohm (500 V CC) |
Inductancia |
4,0 ± 20 % mH |
|
|
Clase de aislamiento |
B |
Parque de sujeción |
30 kg.cm |
|
|
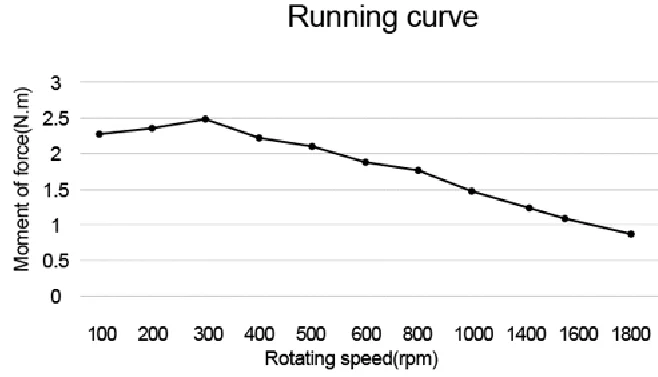
Curva de operación de circuito cerrado integrada 57P3N |
||
|
Velocidad de rotación (rpm) |
Momento de fuerza (N.m) |
Voltaje de accionamiento: 24 V Subdivisión: 400 |
|
100 |
2.3 |
|
|
200 |
2.4 |
|
|
300 |
2.5 |
|
|
400 |
2.2 |
|
|
500 |
2.1 |
|
|
600 |
1.9 |
|
|
800 |
1.85 |
|
|
1000 |
1.5 |
|
|
1400 |
1.25 |
|
|
1600 |
1.1 |
|
|
1800 |
0.9 |
|
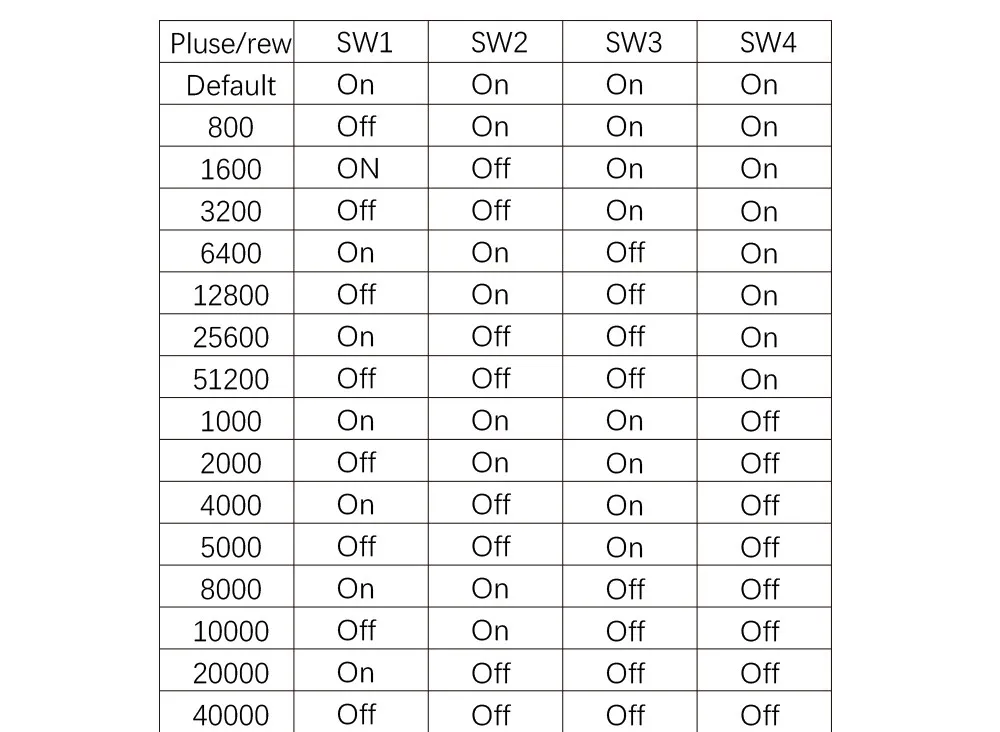
SW2: Motor DIR APAGADO=CCW ON=CW
SW1: El filtro está configurado en ON=3ms y OFF=25MS

Suave y con poco ruido
El algoritmo de control de corriente vectorial espacial basado en codificador de retroalimentación y
La tecnología de filtrado de suavizado vectorial tiene una buena resistencia al
“resonancia de baja frecuencia” que atormenta a los motores paso a paso tradicionales.
El motor aún puede mantener un funcionamiento suave y silencioso en
aplicaciones de baja velocidad
Alto par/alta velocidad
H más alto que el del circuito abierto, y el par efectivo se puede aumentar para
más del 70% del par de retención
Chip de control
El chip de control DSP de motor especial de 32 bits más avanzado y las instrucciones DSO especiales pueden realizar un funcionamiento DSP rápido: control de movimiento suave del motor
se realiza utilizando un filtro suavizante de caja controladora vectorial y otras tecnologías.